


Cross section of the mechanical design of the gearbox.


The interior permanent magnet (IPM) rotor (top left), the outer permanent magnet (PM) stator (top right) and the aluminum and poly carbonate parts for the housing (bottom picture).
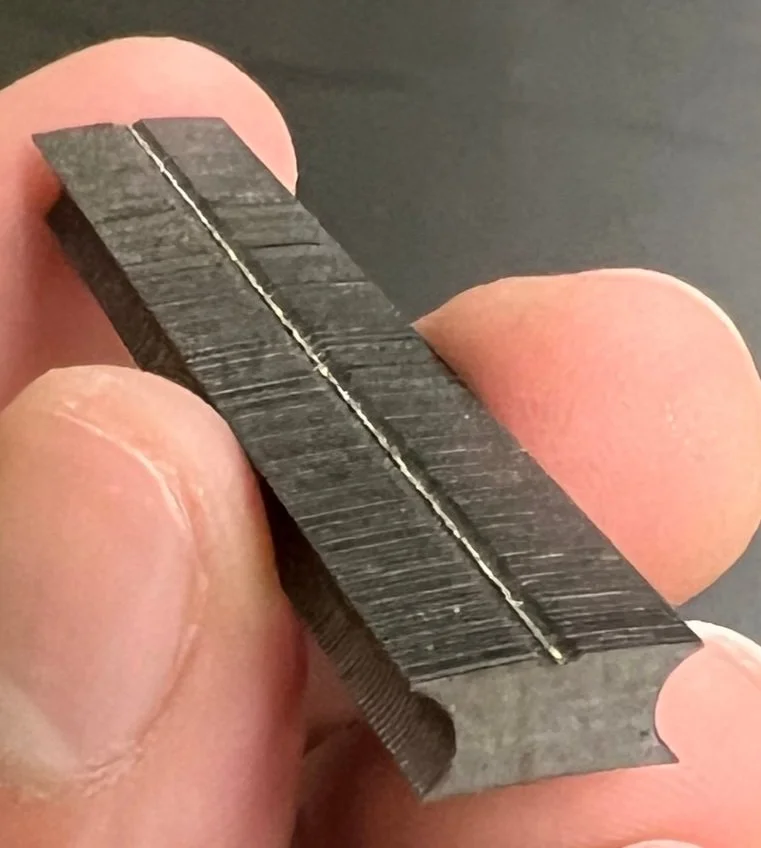
The parameterized modulator (top left), various designs considered in the optimization study (top right), the first version of the modulator cage incorporating the chosen retention shape (bottom left), and a single modulator lamination stack (bottom right).
The modulator cage was 3D printed using carbon fiber reinforced poly carbonate. It took many versions to get the cage to be strong enough, with the final version actually having a thin bridge on both the inside and outside to increase the stiffness. The housing was machined out of 6061 aluminum and the shafts out of non-magnetic 300 series stainless steel. The IPM rotor and the PM stator back irons were made of 29 gauge M19 silicon steel laminations.
Project Overview
Project statement:
Design various ways of holding/retaining modulators in a conventional radial flux magnetic gear and then design and build a proof of concept prototype (in this case for Regal Rexnord) and validate FEA models using testing results
One of the biggest issues in magnetic gear design is finding a way to hold the modulator pieces in place. The difficulty stems from a few reasons. Firstly, the air gap between the modulator rotor and the inner and outer rotors are often in the order of 0.5 mm or 1 mm which makes creating a structure very space constrained. Secondly, the support structure can not be ferromagnetic (since that would disrupt the magnetic fields going through the modulators) which limits the material choices that we have. Lastly, due to the first reason, the force on each modulator can be in the order of kilonewtons which in combination with the second reason makes the design very difficult.
Challenges:
The modulators experince incredibly high forces due to their proximity (1mm) to each of the PM rotors. These forces make the overall design difficult.
The modulator cage bending and deforming
3D printing tolerences
Results:
Slip torque of 76.2 Nm (within 2.5% of FEA)
Continuted operation after long periods at 1800 RPM
A much more detailed explanation and analysis can be found in my research paper on the selection of the modulator support shape to test. That paper can be accessed via IEEE Xplore or directly. The paper that includes the results from the prototype is currently being written :).
Optimizing Modulator Retention Strategies

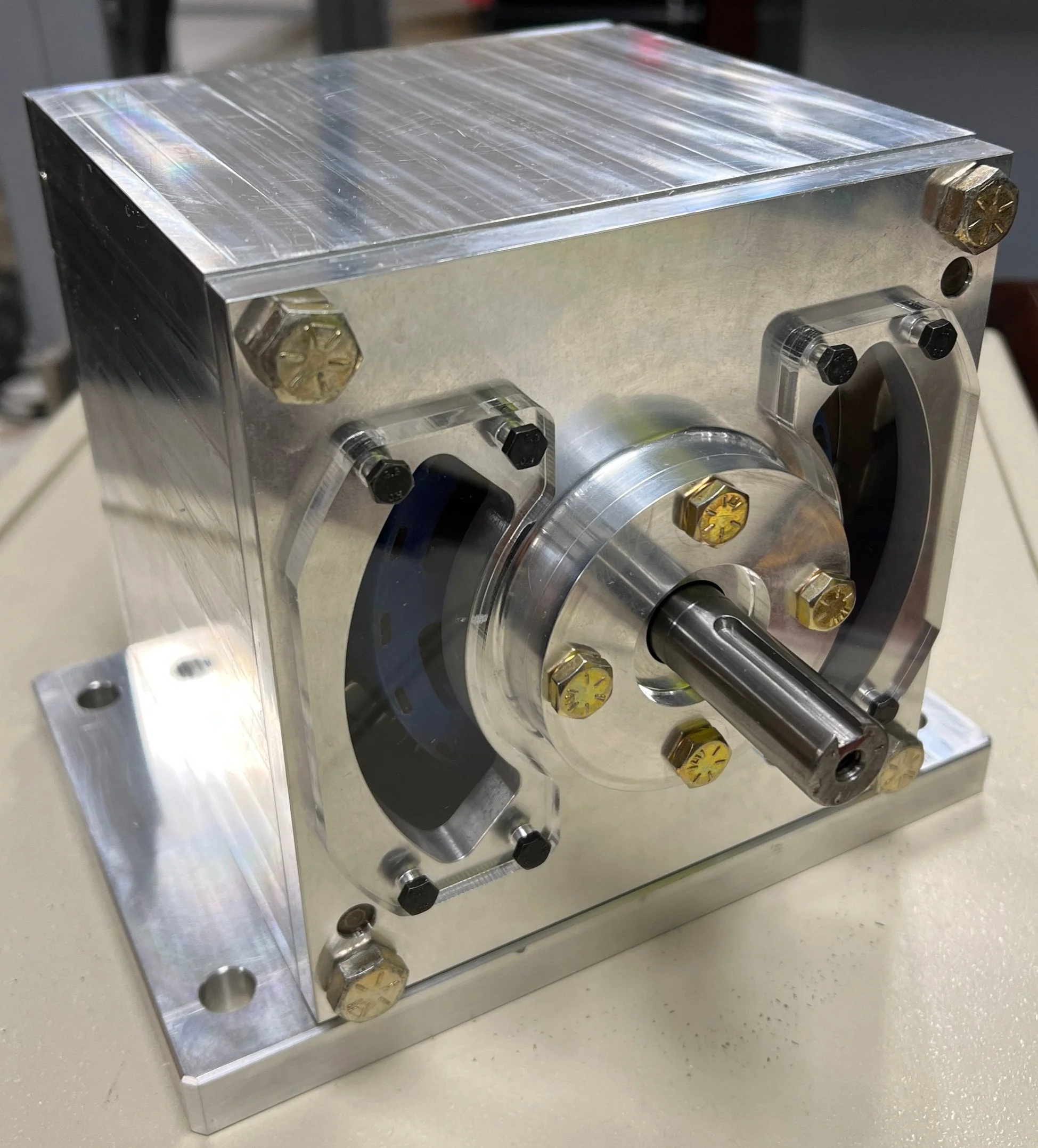
The finished prototype
A video showing the magnetic gear action.
